Текст книги "«Чудо-оружие» Третьего рейха"
Автор книги: Юрий Ненахов
Жанры:
История
,сообщить о нарушении
Текущая страница: 28 (всего у книги 35 страниц)
Эксперименты доказали, что ракетный двигатель прекрасно работает в толще воды. Более того, такой способ пуска даже уменьшал рассеивание и благоприятно влиял на увеличение дальности полета ракет. Адмирал Дениц и его окружение отнеслись к опытам братьев Штайнхофов без особого интереса. Правда, пусковые рамы для неуправляемых ракет в конце войны все лее стали монтировать на подводных лодках основных типов. С их помощью командование кригсмарине надеялось повысить боевые возможности лодок в надводном положении (союзные конвойные корабли градом глубинных бомб все чаще заставляли всплывать подлодки Деница на поверхность). Залп реактивных снарядов, почти равный по весу залпу тяжелого крейсера, при точном попадании мог пустить ко дну любой корабль противолодочной обороны.
В конце войны германское руководство решило возложить на подводные лодки задачу нанесения «ударов возмездия» по недосягаемым американским портам и городам: японцы использовали для этой цели аэростаты с подвешенными авиабомбами, а немцы уповали на использование значительно более современных средств. С 1943 года начались исследования возможностей атаки атлантического побережья США ракетой А-4 (см. раздел «Оперативно-тактические ракеты»).
Подводные лодки проекта XXI должны были тащить на буксире до трех плавучих контейнеров с баллистическими ракетами через всю Атлантику и в подходящем районе осуществлять их пуск. В качестве базы для предполагаемого размещения лодок, вооруженных этими ракетами, было избрано побережье Норвегии. Оттуда ПЛ могли выходить в открытый океан, минуя противолодочные барражи союзников возле берегов Франции, Бельгии, Голландии. 30-метровый контейнер с ракетой, заправленной жидким топливом, водяным балластом и контрольной аппаратурой имел массу 500 тонн. После заполнения трюмных отсеков контейнера забортной водой последний разворачивался в вертикальное, боевое положение. Крышка ракетной шахты, чья горловина располагалась вровень с уровнем моря, откидывалась и по команде с борта лодки мог происходить запуск.
В декабре 1944 года Штеттинская судоверфь «Вулкан» получила заказ на изготовление трех таких контейнеров. Тем временем верфь «Schichau» (Эльбинг) вела постройку опытного образца начата. Отдельные элементы конструкции прошли несколько испытаний в Балтийском море, однако окончание работ по проекту не состоялось – в конце войны Германия уже не могла наладить массовое развертывание подобных систем. Кроме того, технические особенности АIV (V 2) влекли за собой ряд труднопреодолимых проблем в увязке с возможностями подводных лодок. Баллистическая ракета имела двигатель, работающий на двукомпонентном жидком топливе. Применение этой сложной капризной системы требовало тщательной и долгой проверки ее основных узлов непосредственно перед пуском. К тому же «Фау-2» нельзя было транспортировать в снаряженном состоянии. Наконец, лодка с громоздким (почти половина длины корпуса лодки XXI серии) контейнером на буксире неизбежно становилась хорошо заметной мишенью для противолодочных кораблей и самолетов союзников.
Несмотря на все это, несколько подлодок – буксировщиков ракетных контейнеров уже проходили переоборудование.

Рис. 171. Схема запуска ракеты V 2 из-под воды: 1 – контейнер, буксируемый подводной лодкой; 2 – переворот и открытие контейнера; 3 – старт ракеты.
Пока новейшие лодки XXI серии не вошли в строй, было принято решение использовать с этой целью лодки IX серии, базировавшиеся в северной Норвегии (U 518, U 546, U 805, U 880, U 881 и U 1235). Их экипажи начали подготовку к применению нового оружия рекогносцировочным выходом в море, по направлению к берегам Северной Америки.
Американцы, получившие разведывательные данные об опасности обстрелов ракетами V 2 восточного побережья страны, правильно рассчитали наиболее вероятный способ их применения. Командование Атлантического флота США для перехвата этой группы вражеских подлодок развернуло по фронту в 120 морских миль две поисково-ударные противолодочные группы, в составе одного эскортного авианосца и десяти снабженных гидролокаторами эсминцев каждая. Линия перехвата проходила по меридиану 30 градусов западной долготы. Первая группа вела поиск целей севернее параллели 48 градусов 30 минут, вторая – южнее ее. Обе группы двигались в строю фронта курсом на ост (восток), расстояние между кораблями в строю составляло 50–60 кабельтовых (9,2—11,1 км). Перед этими группами и вокруг них вели поиск противолодочные самолеты (радиус действия – 169 миль). После обнаружения лодки в надводном положении авиация немедленно проводила ее атаку и посылала сообщение боевым кораблям. Учитывая применение немцами «шнорхелей», самолеты использовали опускающиеся гидроакустические радиобуи.
15 апреля 1945 года подводную лодку U 1235 обнаружили и уничтожили два корабля ПЛО. Вскоре после этого U 880 подверглась атаке самолетов и получила повреждения. После получения сигнала об обнаружении субмарины поиск начали два эсминца, потопившие ее глубинными бомбами на следующее утро. Обе лодки двигались по направлению к побережью Соединенных Штатов, курсом вест (запад). 18 апреля была обнаружена и атакована U 805, на сей раз безуспешно. Через трое суток, 21 апреля группа из двух эсминцев потопила U 518. В это же время командование ВМФ США развернуло вдоль меридиана 45 градусов западной долготы вторую линию перехвата – в состав двух ее групп вошли два авианосца и 22 эскортных миноносца. Корабли регулярно прочесывали участок моря шириной 120 миль. Результат не заставил себя ждать: 23 апреля группа второй линии в составе шести вымпелов обнаружила лодку U 546, на следующий день последняя была уничтожена. Очередную субмарину – U 881, та же участь постигла в начале мая. Итак, за исключением прорвавшейся назад на базу U 805, вся группа погибла, так и не успев выйти в районы предполагаемого пуска ракет.
Легко оценить, какой была бы эффективность боевого рейда к берегам США небольшой группы лодок, вооруженных ракетами. Тактика действий сил ПЛО, поднятая союзниками к 1944 году до уровня точной науки, не позволила бы им осуществить хотя бы один эффективный групповой запуск V 2. Да и масштабы предполагавшегося применения ракет не впечатляют; шесть ракет ни в коем случае не смогли бы нанести сколько-нибудь существенный урон объектам на территории Америки.
Более перспективным, чем вооружение подлодок баллистическими ракетами, проектом, являлось намерение оснастить их самолетами-снарядами V 1, для запуска их из водонепроницаемых контейнеров, установленных на палубе. Отсюда уже рукой подать до современных ударных лодок, вооруженных крылатыми ракетами, но и этот перспективный проект остался нереализованным. Зато американцы, ознакомившись с указанными разработками, после войны оборудовали несколько своих крупных океанских подлодок крылатыми ракетами JB 2 «Loon» (американская копия V1). Поскольку до сентября 1945 года на Тихом океане еще продолжались боевые действия, американских моряков интересовала возможностью применения этих ракетных комплексов. Две подводные лодки («Cusk» и «Carbonero») оборудовали палубными контейнерами, в которых разместили самолеты-снаряды LTV-N-2 (морской вариант «Лун») и провели ряд испытательных стрельб. Недостатки этой конструкции (в контейнере помещалась только одна ракета; невозможность точной оценки взаимного положения пусковой установки и цели вела к низкой точности стрельбы; длительные предстартовые работы делали подлодку, находящуюся в надводном положении, весьма уязвимой для противника) оказались слишком весомыми и программу закрыли.
* * *
Много сил и средств немцы затратили на разработку устройств, обеспечивающих маскировку подводных лодок. Эта необходимость была обусловлена катастрофическими потерями весны и лета 1943 года, вызванными применением западными союзниками радиолокационной техники, гидролокаторов и других новых средств борьбы. Если в январе немцы потеряли б подлодок, то в феврале сразу 19. В марте и апреле – по 15. В мае произошла настоящая катастрофа: погибла 41 подлодка. В июне 17, в июле 37, в августе 25. Иными словами, за 7 месяцев (февраль – август) кригсмарине потерял 169 лодок, более одной трети от общего числа находившихся в строю. Военно-морское ведомство начало лихорадочный поиск средств, способных существенно снизить заметность лодок для радиолокаторов в надводном положении, и для гидролокаторов – в подводном.
Одним из первых, притом наиболее удачных механизмов такого рода стал шнорхель (Schnorchel – «дыхательное устройство») – воздуховодная труба, позволявшая использовать дизельные двигатели в подводном положении, на перископной глубине. Применение этого устройства позволяло подлодке неограниченное время находиться в погруженном состоянии (вентиляция отсеков также осуществлялась через шнорхель), что резко снижало ее визуальную и радиолокационную заметность – перископ и навершие шнорхеля, едва поднимающиеся над водой, не фиксировались на экранах радаров.
Вопреки распространенному мнению, шнорхель не являлся немецким изобретением. Еще во время русско-японской войны в экспериментальном порядке подобное устройство получила субмарина российской Тихоокеанской эскадры «Кета». В 1904 году его разработал лейтенант императорского флота С. А. Янович. Впоследствии инженер-поручик Б. Е. Сальяр сконструировал усовершенствованный вариант воздуховода, принципиально ничем не отличавшийся от шнорхеля. Впервые им оснастили подлодку «Фельдмаршал граф Шереметев». В 1915 году еще две русские ПЛ на Балтике («Волк» и «Леопард») получили шнорхели конструкции старшего лейтенанта Н. А. Гудима – они представляли собой модифицированный образец устройства Сальяра. После революции 1917 года развитие этих устройств в русском флоте прервалось.
В межвоенный период эксперименты с поднимаемыми воздуховодами, правда, применяемыми только для вентиляции отсеков, проводили в итальянском флоте – в 1925 году их установили на субмарине «Sirena». Наконец, в феврале 1940 года шнорхель отечественной конструкции был установлен на подводной лодке 0-21 ВМФ Нидерландов. Это устройство состояло из двух выдвижных телескопических труб: в одной (впускном воздуховоде) для предупреждения случайного попадания воды внутрь помещений лодки устанавливался плавающий шаровой клапан. Выхлопная труба клапаном не оснащалась. Кроме вентиляции отсеков и питания воздухом работающих дизелей, шнорхель позволял осуществлять подзарядку аккумуляторов в подводном положении. К апрелю 1940 года новое оборудование прошло успешные испытания, а в мае Нидерланды оккупировали германские войска.
Немцы ознакомились с содержанием голландских работ, но интереса к изобретению поначалу не проявили. Только кризисной весной 1943 года большие потери в лодках заставили руководство кригсмарине срочно рассмотреть вопрос о массовом применении шнорхеля. Было принято решение об оснащении этим устройством всех океанских лодок как старых, так и новых проектов.
Первый серийный образец шнорхеля, устанавливавшийся на модернизированных ПЛ, был практически идентичен голландскому прототипу. Наиболее существенным отличием стало объединение обеих труб в единый кожух; последний мог откидываться в горизонтальное положение и убираться в выемку палубы. Относительная примитивность конструкции шарового клапана серьезно ограничила возможность применения шнорхеля даже при небольшом волнении на море. При попадании воды клапан моментально закупоривался, но дизели продолжали работать, быстро откачивая воздух из внутренних помещений субмарины. Это приводило к явлениям декомпрессии и связанным с этим травмами органов слуха и дыхания различной тяжести. Вахтенные должны были постоянно следить за работой клапана, чтобы в случае его закрытия незамедлительно выключить двигатели.
Существовали и другие недостатки – гидрофоны подводных лодок не могли работать при включенных дизелях, а это не позволяло эффективно следить за обстановкой на море, Под водой шнорхель мог обеспечивать лишь шестиузловый экономический ход, тогда как на поверхности подлодки IX серии ходили под дизелем экономическим ходом 12 узлов. Наконец, обитаемость старых лодок (в особенности VII серии) не была рассчитана на длительное пребывание под водой, по этой причине эффективность применения шнорхеля снижалась еще больше.
По-настоящему работоспособный шнорхель с шаровым клапаном появился только к 1945 году, он предназначался для установки на субмаринах XXI и XXIII серий. Его конструкция была не откидной, а телескопической, благодаря чему высота подъема навершия над уровнем моря могла регулироваться в зависимости от волнения. Другим важным усовершенствованием стало автоматическое отключение дизелей в случае перебоев с поступлением воздуха. В частности, при обнаружении противника лодка могла аварийно погрузиться на большую глубину, не тратя времени на смену движителя и блокировку воздуховодов.

Рис. 172. Шнорхель раннего образца.
Максимальная скорость движения под водой со шнорхелем составила 12 узлов (на электромоторах – 13,5 узлов).
Кроме шнорхеля, существовали другие проекты снижения заметности ПЛ. В 1943 году начались работы по исследованию противорадиолокационного покрытия, которое планировалось наносить на рубки и корпуса подводных лодок (прародитель технологии «Stealth»). Но в то время подобные технологии не были развиты и проект остался нереализованным. Было разработано так называемое активное резонансное покрытие, поглощавшее импульсы радиолокатора. Кроме спец-покрытия, подводники пытались создавать пассивные помехи на лодке, идущей в надводном положении. К ее корпусу прикрепляли дипольные отражатели – ленты алюминиевой фольги (идея была заимствована у англичан: их ночные бомбардировщики в целях дезориентации радаров германской ПВО разбрасывали огромное количество алюминиевых полосок).
Разрабатывались и активные средства маскировки. В 1944 году был предложен проект ложной буксируемой цели, получивший кодовое обозначение «Wasseresel» («Морской осел»). Он представлял собой полностью погруженный буксируемый макет подлодки небольшого размера, начиненный мощным зарядом взрывчатки. Своими сигналами аппарат имитировал цель. По замыслу разработчиков, «Вассерэзель» должен был отвлекать внимание противолодочных сил от истинной цели, а в случае поражения глубинными бомбами – имитировать ее гибель. Проект оказался неудачным и работы над ним вскоре прекратили.
Еще более неудачным оказался другой проект дезориентации гидролокатора – создание специального химического состава, обильно выделявшего в воде пузырьки газа. При фиксации экипажем подлодки сигналов гидролокатора (последние воспринимались как сильные щелчки по корпусу) этот состав следовало подавать за борт. Тогда лодку окружала туча газовых пузырьков и гидроакустический контакт с ней прерывался. Однако пузырьки газа, поднимающиеся на поверхность, были слишком хорошо заметны и безошибочно указывали местонахождение подлодки, «корректируя» глубинное бомбометание.
Применение всех этих средств не могло решить проблему противодействия средствам активного обнаружения, в особенности РЛС. В поисках выхода немцы выяснили, что в конце 30-х годов во Франции проводились эксперименты с устройством, способным фиксировать облучение волнами дециметрового диапазона в радиусе 40 морских миль. Этот прибор назвали «Metox». Германские моряки немедленно воспользовались им: «метоксы», укрепленные на деревянных крестовинах (так называемый «Biskayakreuz» – «Бискайский крест»), стали эффективным средством борьбы с радиолокаторами. Получив сигнал от работающего радара противника, лодка могла теперь заблаговременно погрузиться и избежать внезапного удара.
Однако затем кривая потерь вновь поползла вверх – немецкие подлодки стали подвергаться атакам самолетов, снабженных сантиметровыми РЛС, работу которых не фиксировали детекторы «Метокс». После напряженных исследований по выявлению рабочей длины волн новой аппаратуры противника (вначале диапазон новых радаров не был известен даже приблизительно), потеряв почти полгода[29]29
Германские ученые долгое время убеждали руководство военно-морского флота, что радиолокация в сантиметровом диапазоне принципиально невозможна.
[Закрыть], немцы наладили выпуск коротковолнового детектора «Naxos». Последний оказался не очень удачным, кроме того, германской промышленности так и не удалось произвести необходимое количество приборов.

Рис. 173. Детектор излучения РЛС типа «Metox» с антенной «Бискайский крест».

Рис. 174. Детектор излучения РЛС типа «Naxos».
Производство «наксосов» достигло приемлемых объемов только к началу 1945 года.
Немецкие подводники, в свою очередь, тоже применяли радары. В 1942 году на вооружение была принята РЛС дециметрового диапазона типа FuMo (Funkmessortung) 29, со сложной неподвижной многовибраторной антенной. Последнюю устанавливали в передней части ограждения рубки. Контур приемной антенны размещался над контуром передающей, обе они покрывались радиопрозрачным кожухом, снабженным козырьком. Часто антенну прикрывали дополнительным защитным щитом. Вслед за не вполне удачными дециметровыми радарами в 1944 году последовали FuMo 30, работавшие в сантиметровом диапазоне. Ее антенна кругового вращения стояла над рубкой. В связи с тем, что серийный выпуск FuMo 30 до самого конца войны шел с перебоями, ими удалось оснастить далеко не все лодки.
Глава 33. Сверхмалые подводные лодки
В 1943—44 годах немцы, постепенно сдававшие свои позиции на морях под ударами союзных флотов, начали обращаться к тактике «малой войны». По мнению их военных теоретиков, небольшие штурмовые отряды, снабженные различным специальным оружием, могли нанести серьезный ущерб английскому флоту в его базах. Основанием такому суждению послужили значительные успехи, которых в начале второй мировой войны добились итальянские и британские морские диверсанты – боевые пловцы. Подобная тактика получила полное одобрение со стороны Деница, являвшегося ярым сторонником применения сверхмалых подводных лодок.
Вначале немцы, находившиеся под впечатлением конструкции японских сверхмалых подлодок (впервые примененных для атаки на Перл-Харбор в декабре 1941 года), попытались приобрести разработки инженеров Страны Восходящего солнца, однако их союзники ревниво оберегали свои тайны. Поэтому прошло еще два года, прежде чем в Германии сумели создать первый образец отечественной мини-подлодки. Главным предназначением этих небольших, дешевых и малозаметных средств стало отражение предполагаемого вторжения англичан и американцев на север Франции.
В конце 1943 года в приморском городке Хайлигенхафен началось формирование нескольких флотских отрядов, получивших общее название «соединений К» (от термина Kleinkampfverbaende – соединения малого боя). В состав подобных формирований должны были войти группы боевых пловцов, человекоуправляемых торпед, сверхмалых подлодок и взрывающихся катеров. В целом мысль моряков Третьего Рейха двигалась в направлении, параллельном Японии, за исключением того, что экипажи подобных средств не должны были погибать вместе с противником.
На первом этапе численность личного состава отряда «К» составляла 30 человек, его командиром был назначен кадровый офицер-подводник Хельмут Хейе (Hellmut Heye) – впоследствии вице-адмирал. К весне 1944 года количество матросов и офицеров возросло настолько, что стало возможным формирование трех групп по 23 человека в каждой. Группы получили названия МЕК (Marine Einsatzkommando – морской оперативный отряд) и номера – соответственно 60, 65 и 71.

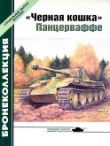
Рис. 175. Подводная лодка «Hecht».
В январе 1944 года в отряд доставили две трофейные английские сверхмалые подлодки типа ХЕ, захваченные во время проведения ими операции против линкора «Тирпиц» в Норвегии. На основе проекта английских лодок судостроительная фирма «Gluckauf» выпустила небольшое количество двухместных лодок XXVII серии «Hecht» («Щука»). Как и британский прототип, «Хехт» имела только электродвигатель и несла одну мощную мину, предназначенную для скрытой установки вблизи днища корабля противника. Мина находилась в носовой части корпуса, в отделяемом контейнере. Электродвигатель мощностью 13 л. с. обеспечивал лодке дальность плавания 90 миль, однако после установки тяжелого гирокомпаса она упала до 38 миль 4-х узловым ходом. Водоизмещение лодки было 11,8 тонн; длина 10,4 и ширина 1,7 метров. В целом корабль унаследовал все недостатки английских лодок. Хотя немцы построили 53 лодки типа «Хехт», в боях они не участвовали, а использовались лишь в учебных целях.

Рис. 176. Компоновочная схема лодки «Hecht»: 1 – электродвигатель; 2 – перископ с обтекателем; 3 – шахта входного люка; 4 – гирокомпас; 5 – аккумуляторы; 6 – отделяющийся контейнер; 7 – торпеда; 8 – уравнительная цистерна.
Впоследствии немцы решительно отказались от применения мин, бывших оружием англичан и итальянцев, и в качестве основного – наступательного – вооружения стали применять 533-мм торпеду G 7Е с электродвигателем. Для уменьшения отрицательной плавучести небольших суденышек с G 7Е демонтировали половину тяжелых аккумуляторных батарей. А в освободившейся от мины носовой части подлодки разместили дополнительные аккумуляторы. Вооружение сверхмалых лодок торпедами позволило осуществлять атаки на корабли противника, стоящие на рейдах, а также на прибрежные конвои и десантные суда.
Поскольку испытания и эксплуатация лодок типа «Хехт» выявили множество недостатков конструкции, а применение единственной сбрасываемой мины (затем – торпеды), не могло быть достаточно эффективным, в 1944 году началось проектирование одноместной сверхмалой подлодки типа «Molch» («Тритон»). Как и «Хехт», она оснащалась исключительно электродвигателем и по своей конструкции принципиально не отличалась от предыдущей серии.

Рис. 177. Компоновочная схема лодки «Molch»: 1 – кормовая оконечность; 2 – электромоторный отсек; 3 – шахта входного люка; 4 – перископ; 5 – труба нактоуза; 6 – отсек управления; 7 – аккумуляторный отсек; 8 – аккумуляторы; 9 – носовая балластная цистерна; 10 – торпеды; 11 – электродвигатель; 12 – горизонтальный руль; 13 – отсеки жизнеобеспечения.
Стенки цилиндрического прочного корпуса (длина – 10,8, диаметр – 1,14 метров) выполнялись из 3–3,5-мм стальных листов. В носовой части размещалась главная балластно-дифферентная цистерна длиной 0,85 метра. За ним находился длинный, на две трети длины корпуса, аккумуляторный отсек (свыше 4 метров). В нем размещались 14 торпедных аккумуляторов, объединенных в одну батарею, а также бортовые цистерны со сжатым воздухом – для компенсации отрицательной плавучести торпед. В третьем отсеке длиной около 1,35 метра размещалось пилотское кресло и основные органы управления. Шахта входного люка была совмещена с миниатюрной ходовой рубкой, снабженной иллюминаторами и выдвижным перископом высотой 1,5 метра. Наконец, в кормовом отсеке полуметровой длины располагался электромотор, а также баллоны со сжатым воздухом и кислородом. В качестве дополнительного двигателя могли использоваться моторы электроторпед G 7Е, подвешенных в днищевых выемках прочного корпуса.
Производство лодки развернули в июле 1944 года – в отличие от своей предшественницы, «Мольх» строили большой серией: 390 единиц.

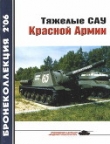
Рис. 178. Подводная лодка «Seehund».
Тем временем был создан проект третьей серии (XXVIIB) сверхмалых подлодок типа «Seehund» («Морская собака»). Ее характеристики были значительно улучшены за счет увеличения водоизмещения более чем на 3 тонны (оно составило почти 15 тонн). Длина лодки 12 метров, ширина 1,7 метра, экипаж 2 человека. Прочный корпус изготавливался из 5-мм стального листа. Рабочая глубина погружения достигла 30 метров, экстренная в два раза больше. Одним из наиболее ценных качеств лодок этого типа являлось рекордно короткое время погружения: всего 5 секунд, в то время как большие лодки традиционной конструкции тратили на этот процесс 45–60 секунд. Дизель отключался после закрытия впускного клапана шнорхеля, а электромотор включался уже в подводном положении. Благодаря этому «Зеехунд» мог легко уклоняться от ударов противолодочной авиации, моментально уходя на глубину. Подъем на поверхность осуществлялся двумя способами: вытеснением воды из балластных цистерн воздухом из баллонов высокого давления, либо динамическим способом – выхлопными газами включенного еще под водой дизельного мотора.
«Зеехунд» под дизелем мощностью 60 л. с., на скорости 7 узлов проходил 300 миль (с использованием шнорхеля). На электромоторе (мощность 25 л. с.) 3-х узловым ходом он проплывал 63 мили. Максимальная скорость под дизелем достигала 7,7 узла, на электромоторе – 6 узлов. В распоряжении экипажа находились перископ, гирокомпас и шнорхель новой конструкции (подобный примененному на больших лодках XXI серии). Вместо одной торпеды G 7Е лодка была вооружена двумя, частично утопленными в продольные выемки корпуса по бортам. Первые лодки серии XXVIIB были спущены на воду в сентябре 1944 года.
К этому времени «второй фронт» стал реальностью, а северное побережье Франции было очищено от немцев. Перед кригсмарине встала задача действий на коммуникациях противника в Ла-Манше с пунктов базирования удаленных на восток, к границам рейха. Поэтому базой первой группы «Зеехундов» стал Эйменден (Нидерланды). В первом походе, состоявшемся в конце декабря в сложных метеоусловиях, погибли 16 лодок из 18, вышедших в море. Во время второго патрулирования не было потеряно ни одной лодки, но закончилось оно безрезультатно. Первые победы новые корабли одержали только зимой 1945 года. В феврале они потопили свой первый транспорт, к апрелю «Зеехунды» отправили на дно девять судов (общей сложностью в 120 тысяч регистровых тонн), еще три транспорта союзников получили тяжелые повреждения. Наиболее крупным боевым кораблем, уничтоженным «Морской собакой», оказался французский эсминец «La Combattante», торпедированный 22 февраля 1945 года восточнее банки Саут-Фоллз лодкой N 330 под командованием лейтенанта К. Шпарбродта (Sparbrodt). В самом конце войны в Европе, лодки серии XXVIIB доставили в осажденный союзниками Дюнкерк так называемые «масляные торпеды» – 4,5-тонные цилиндрические цистерны, наполненные пищевыми жирами. На обратный путь лодки взяли на борт груз писем солдат и несколько офицеров блокированного гарнизона.

Рис. 179. Компоновочная схема лодки «Seehund»: 1 – вертикальный руль; 2 – упорный подшипник; 3 – электродвигатель; 4 – выхлопная труба дизеля; 5 – дизель; 6 – ограждение рубки; 7 – клапан шнорхеля; 8 – труба ГОН; 9 – антенна радиостанции; 10 – входной люк; 11 – перископ; 12 – отсек управления; 13 – аккумуляторный отсек; 14,15 – аккумуляторы; 16 – горизонтальный руль; 17 – кресло механика; 18 – уравнительная цистерна; 19 – кресло командира; 20 – торпеды.
Однако в целом «Зеехунды» оказались не более успешными, чем примененные одновременно с ними человекоуправляемые торпеды (см. ниже); по этой причине их построили всего 80 единиц.
В начале 1945 года к серийному выпуску была подготовлена подводная лодка типа «Kreislauf Seehund» (то есть «Зеехунд» с замкнутым циклом дизеля). Более совершенная силовая установка обладала значительно лучшими маскировочными качествами. Длина корпуса ПЛ составила 13,3 метров. Одновременно был спущен на воду опытный образец сверхмалой лодки «Schwertwall» («Нарвал»). Она оснащалась парогазовой турбиной Вальтера, позволявшей развивать под водой скорость до 30 узлов. Дальность плавания составляла 100 миль. Вооружение – две 533-мм торпеды.
Гибридом сверхмалой подлодки и человекоуправляемой торпеды стал «Delphin» – взрывающаяся субмарина, снабженная катапультируемым креслом водителя. Его созданием руководил профессор Корнелиус (Cornelius). Особенностью лодки было применение динамического способа погружения, делавшего ненужным использование баллонов высокого давления. В результате этого усовершенствования конструкция подлодки существенно упростилась, как и управление ею.
Испытания «Дельфина» начались осенью 1944 года. Они показали правильность выбора примененных на ней технических приспособлений. Боевое использование этой лодки планировалось следующим образом: погрузившись, лодка выходила в позицию для атаки корабля противника. Пилот разгонял ее, нацеливая в наиболее уязвимое место, после чего катапультировался в непосредственной близости от цели. Однако, малые размеры лодки и связанная с этим неудовлетворительная автономность не позволили принять ее на вооружение. Три завершенных опытных экземпляра взорвали в апреле 1945 года во избежание попадания в руки противника. На основе конструкции «Дельфина» в начале 45-го немцы начали создание большей по водоизмещению и габаритам взрывающейся лодки, оснащенной турбиной Вальтера. Подводная скорость хода последней должна была достичь 15 узлов. Строительство этой субмарины не успели даже начать.

Рис. 180. Компоновочная схема подводной лодки «Biber»: 1, 12 – цистерны № 1 и № 2; 2 – упорный подшипник; 3 – передача; 4 – электромотор; 5 – муфта; 6 – бензиновый двигатель; 7 – баллоны с кислородом; 5 – перископ; 9 – шахта подачи воздуха; 10 – герметичный оптический нактоуз; 11 – аккумуляторные батареи.
Наиболее известной сверхмалой немецкой подлодкой стал «Biber» («Бобр»). Его создатель, Генрих Бартельс (Heinrich Bartels), в феврале 1944 года начал работы над проектом по заказу Любекской судоверфи. Уже 23 февраля Бартельс подготовил предварительную документацию проекта, а 15 марта в Любеке построили первый опытный образец «Бибера», получивший название «Adam». 29 марта начались испытания подлодки. Немцы построили 324 единицы данного типа!
В конце августа 1944 года 18 «Бобров» одной из групп «соединения К» были направлены в Фекан (Франция). Первая боевая операция происходила в ночь с 29 на 30 августа против скопления десантных и транспортных судов в устье Сены. В условиях четырехбалльного шторма все 18 лодок прошли вдоль французского побережья, но до назначенного района дошли только две – лейтенанта Дозе (Dose) и обер-фельдфебеля Беша (Boesch). «Биберы» сумели потопить десантный корабль и военный транспорт типа «Liberty». На этом боевые успехи отряда завершились: уже 31 августа под натиском союзников немцы оставили Фекан, лодки перебросили в Роттердам. После отступления в Нидерланды неприятности не закончились: в феврале 1945 года взрыв торпеды одного из «Биберов» на рейде Роттердама уничтожил практически все оставшиеся лодки группы.

Рис. 181. Компоновочная схема лодки «Walros»: 1 – вертикальный руль; 2 – редуктор; 3 – электродвигатель; 4 – дизель; 5 – перископ; 6 – шахта входного люка; 7 – койки; 8 – аккумуляторы; 9 – центральный пост; 10 – торпеды.