Текст книги "Ориентировка по звездам"
Автор книги: Николай Кондратьев
Жанры:
Физика
,сообщить о нарушении
Текущая страница: 6 (всего у книги 7 страниц)
АВТОМАТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ КУРСА И МЕСТА САМОЛЕТА
Определение места самолета секстантом или радиосекстантом по высотам двух небесных светил не дает сразу после их измерения местонахождение самолета. От момента измерения до момента получения места самолета уходит довольно много времени хотя и на простые, но трудоемкие расчеты и прокладку линии положения на карте. Даже опытный штурман затрачивает на астрономические расчеты и прокладку линий положения на карте 6—8 мин. За это время современный самолет удаляется от полученного места на 100—150 км, а некоторые и значительно дальше.
Применение существующих астрокомпасов для определения курса самолета в полете ограничено из-за присущих им недостатков, главный из которых заключается в том, что автоматические астрокомпасы могут применяться только днем в условиях визуальной видимости Солнца. Помимо этого, для применения существующих в настоящее время астрокомпасов необходимо в процессе полета периодически определять место самолета и устанавливать на приборе его координаты. Если учесть большие скорости и дальности полетов современных самолетов, становится ясно, что секстанты и астрономические компасы не полностью удовлетворяют необходимым требованиям. Поэтому в последнее время разрабатываются и применяются так называемые астрономические ориентаторы, в которых процессы пеленгации небесных светил и расчетов полностью автоматизированы. Место и курс самолета выдаются на таких приборах непосредственно на соответствующих индикаторах. Пеленгация светил может производиться фотоэлектрическими или радиоастрономическими следящими системами.

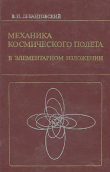
Рис. 41. Принципиальная схема радиоастроориентатора
Принцип работы радиоастроориентатора (рис. 41) заключается в следующем. На гиростабилизированной в горизонтальном положении платформе расположены два (радиотелескопа. Каждый из них представляет собой направленную приемную антенну – параболическое зеркало-отражатель с вибратором и волноводом для приема энергии, излучаемой небесным светилом.
Под действием приходящей от двух светил электромагнитной энергии следящие системы непрерывно поворачивают антенны по азимуту и на угол зенитного расстояния светила. Высоты h 1и h 2передаются в счетно-решающее устройство (СРУ), которое производит вычисления и выдает координаты места самолета на указатель координат (УК). Чтобы разность азимутов двух светил была близка к 90°, выбор светил возлагается на блок настройки (БН). В устройстве БН заложена программа выбора пары звезд в зависимости от широты и долготы места, а также даты и времени суток. Для этого в блок настройки поступают текущие координаты от навигационного координатора (НК). Астрономические ориентаторы, как и радиоастроориентаторы, могут определять место и курс самолета в географической или ортодромической системе координат. В географической системе координат выдаются широта и долгота местонахождения, истинный курс полета; в ортодромической – дальность, боковое уклонение, ортодромический курс самолета (угол между дугой большого круга – ортодромией и продольной осью самолета).
Определение курса самолета по астроориентатору – задача относительно простая. Ее решение основано на автоматическом измерении курсового угла светила и расчете курса по известной уже формуле: ИК = А – КУ.
Для определения места самолета различные схемы астроориентаторов дают возможность решать эту задачу различными методами по наблюдению двух или одного небесного светила.
По наблюдению двух светил место самолета можно определять одновременным измерением высоты этих светил. Одновременное получение двух кругов равных высот в одной из точек их пересечения дает место самолета, которое счетно-решающим прибором выдается в процессе полета в виде текущих координат самолета.
Для автоматического пеленгования звезд и Солнца фотоэлектрические следящие системы необходимо предварительно направить на выбранные светила. Это довольно трудная операция, особенно когда штурман не знает своего местонахождения. Для этого необходимо выбрать два светила с учетом того, чтобы в процессе полета исключить перестройку следящих систем или, если без этого нельзя обойтись, производить эту перестройку в полете как можно реже.
Необходимо также учесть условия естественного освещения при полете по маршруту в назначенное время или, если это возможно, определить наиболее выгодное время взлета для использования в полете лучших условий естественного освещения. Очевидно, что время и место встречи или догона темноты, рассвета и сумерек являются важнейшими факторами в определении условий естественного освещения.
Первоначальная установка следящих систем в направлении на выбранные небесные светила производится по координатам этих светил.
При выборе светил необходимо учитывать их яркость (звездную величину), высоту и разность азимутов между ними. Яркость и высота пеленгуемых светил определяются техническими возможностями фотоэлектрических следящих систем.
Разность азимутов пеленгуемых светил определяет точность получения координат места самолета. Наибольшая точность получается, когда направления на светила пересекаются примерно под прямым углом, т. е. когда разность азимутов двух светил близка к 90 или 270°. Однако на практике трудно подобрать пару звезд с такой разностью азимутов и отвечающих другим условиям (яркость, высота). Поэтому практически берут звезды, разность азимутов которых находится в пределах от 60 до 120° или от 240 до 300°.
Автоматическое определение места самолета -по двум звездам можно производить также измерением высоты этих звезд и разности их азимутов. В этом случае при выборе звезд разность азимутов между ними может быть и близкой к 180°.
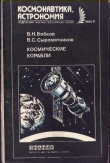
Автоматически определить место самолета по двум звездам можно также измерением высоты одного светила и горизонтального угла положения другого Горизонтальный угол положения – это двугранный угол, образованный плоскостью вертикала одного светила и плоскостью большого круга, проходящего через это же и еще одно светило. Он определяется направлением от одного светила на другое в горизонтной системе координат. Геометрическая сущность определения местоположения этим способом состоит в следующем (рис.42).

Рис. 42. Принцип определения места самолета по измерению высоты одного светила и горизонтального угла положения другого
По измеренной высоте одного светила можно построить круг равных высот, в одной из точек которого находится наблюдатель. Если измерить горизонтальный угол положения q второго светила и отложить его в точке географического места первого светила С 1от большого круга, соединяющего географические места обоих светил С 1и С 2, то образованная этим углом линия будет второй линией положения, которая в пересечении с первой линией положения – кругом равных высот – даст место самолета М. Эти две линии положения всегда пересекаются под прямым углом и однозначно определяют координаты самолета.
Точность определения места самолета этим способом не зависит от величины горизонтального угла положения светил, поэтому в выборе их имеются большие возможности. Однако этот угол не должен быть близким к 0 или 180°, так как измерение его в этом случае даст большую ошибку, что соответственно внесет ошибку и в определение местоположения. Этот способ может быть применим и днем по наблюдениям Солнца и Луны, если последняя находится над горизонтом и ее фаза не близка к новолунию и полнолунию.
Существенным недостатком определения места самолета по наблюдениям двух светил является невозможность или ограниченность применения их днем. Большую часть светлого времени днем над горизонтом видно только одно светило– Солнце и только небольшое время – около 8% светлого времени в году – видна и Луна. Поэтому астрономические ориентаторы, методы работы которых основаны на пеленгации двух небесных светил, при всех их достоинствах (точность автоматической пеленгации и точность расчета координат самолета) ограничены в применении.
По наблюдению одного светила место самолета может быть определено измерением высоты светила и скорости ее изменения или измерением высоты и азимута светила.
Сущность определения места самолета при автоматическом измерении высоты и азимута какого-либо светила сводится к тому, что место самолета получается в точке пересечения двух линий положения: круга равных высот, полученного в результате измерения высоты светила, и линии равных азимутов [2]2
Линия, в каждой точке которой азимуты светила равны между собой
[Закрыть], получаемой измерением азимута светила.
Этот метод определения местонахождения самолета астроориентатором в воздухе по своей идее весьма прост, однако точность вычисления координат при этом пока еще низкая главным образом потому, что азимут самолета определяется с малой точностью из-за больших ошибок при измерении истинного курса самолета. Для получения места самолета с ошибкой не более 10—20 км необходимо курс самолета измерять с точностью до 5—10'. Ошибка в определении курса в 1° дает ошибку определения координат до 100 км.
Метод определения места самолета автоматическим измерением высоты какого-либо светила и скорости изменения этой высоты предусматривает учет путевой скорости и угла сноса в полете. При этом навигационные элементы полета – путевая скорость (скорость полета относительно поверхности Земли) и угол сноса (угол между продольной осью самолета и направлением полета)—должны измеряться с достаточно высокой точностью.
В последние годы широко разрабатывается и применяется способ определения путевой скорости и угла сноса, основанный на использовании эффекта Допплера (изменение частоты отраженных от земли электромагнитных колебаний, излучаемых аппаратурой самолета в полете).
Аппаратура, работающая на этом принципе, дает высокую точность измерения путевой скорости и угла сноса.
ОРИЕНТИРОВКА В КОСМИЧЕСКОМ ПОЛЕТЕ
Сбылась дерзновенная мечта человечества – созданное руками советских людей искусственное тело преодолело силу земного притяжения и вышло в космическое пространство. Запуск первого советского искусственного спутника Земли, открывший 4 октября 1957 г. эру завоевания космоса, стоит в ряду таких поворотных событий в истории развития человеческого общества, как открытие огня, изобретение паровой машины, открытие электрического тока и его действия на магнит, положившее начало электротехнике, взлет первого аэроплана, освобождение энергии атомного ядра.
Искусственные спутники Земли, представляющие собой научные лаборатории со сложной измерительной, вычислительной и передающей аппаратурой, доставили ценнейшие сведения о природе космоса и явлениях в нем, которые нельзя было получить иным путем. Впервые в истории человечества советские люди забросили вымпел на Луну, сфотографировали еще никогда и никем не виденную ее обратную сторону, запустили космическую ракету, вышедшую на орбиту вокруг Солнца и ставшую первой искусственной планетой солнечной системы.
В 1959—1960 гг. были выведены на орбиту вокруг Земли пять кораблей-спутников весом 4540—4700 кг с подопытными животными и другими биологическими объектами. 12 февраля 1961 г. с тяжелого искусственного спутника стартовала управляемая космическая ракета, которая вывела автоматическую межпланетную станцию на траекторию к планете Венере.
Огромные успехи нашей страны в освоении космоса подготовили космический полет человека. Это великое событие в истории культуры человечества совершилось 12 апреля 1961 г. В 9 ч 7 мин по московскому времени космический корабль-спутник «Восток» с человеком на борту поднялся в .космос и, совершив полет вокруг земного шара, благополучно вернулся на священную землю нашей Родины – Страны Советов.
Первый человек, проникший в космос,—советский человек, гражданин Союза Советских Социалистических Республик военный летчик майор Юрий Алексеевич Гагарин.
Через четыре месяца, 6 августа 1961 г., мир облетела весть еще об одном беспримерном подвиге советского народа. Космический корабль «Восток-2», управляемый гражданином Советского Союза майором Германом Степановичем Титовым, совершил более 17 оборотов вокруг Земли и, пробыв около 25 ч в космическом полете, благополучно приземлился в заданном районе.
Беспримерная победа человека над силами природы, величайшее завоевание науки и техники, торжество человеческого разума, войдет в века. Теперь уже недалек тот день, когда космические корабли полетят с человеком на борту к другим планетам, в другие миры. Путь к ним открыт. Началась новая эра завоевания космоса человеком.
Вероятно, полеты будут совершены сначала на ближайшие к нам небесные тела – Луну и планеты Марс и Венеру.
Эти небесные тела в значительной мере изучены, но многое в них непонятно и загадочно. Происхождение кольцевых гор и пылеобразной поверхности Луны, полярных шапок и спутников Марса, слоя облаков, окружающих Венеру, и множество других явлений объясняются пока только научными гипотезами, подлежащими практической проверке. Особенно интересен полет на Марс, где предполагается наличие жизни. Расстояние до этих небесных тел сравнительно невелико: минимальное расстояние до Луны 382 200 км, до Венеры – 40 000 000 км, до Марса – 56 000 000 км. Для космического корабля, летящего с минимальной начальной космической скоростью, продолжительность полета будет составлять: до Луны – 5 суток, до Венеры– 146, до Марса – 259 суток. Укажем для сравнения, что для полета на Плутон понадобится 30—40 лет.
Маршруты космических полетов рассчитываются так, чтобы движение по космическим траекториям после освобождения от силы притяжения Земли происходило под действием силы притяжения Солнца по эллиптической орбите, без работы двигателя и, следовательно, без затраты запасов энергии, имеющихся на корабле. Энергия корабля будет тратиться только для выхода на орбиту, кратковременного маневра на орбите и выхода на траекторию, обеспечивающую посадку на планету.
При выборе траектории полета космического корабля необходимо будет учитывать не только его энергетические возможности, но и ряд других важных факторов. Например, траектория полета не должна проходить вблизи Солнца, пересекать орбиты метеорных потоков, проходить в зонах с недопустимой величиной космической радиации.

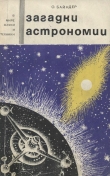
Рис. 43. Поверхности положения: а – сфера; б – циклида, в – конус
Момент старта космического корабля должен быть рассчитан так, чтобы пересечение его траектории с орбитой планеты назначения произошло тогда, когда в расчетной точке встречи будут находиться и корабль и планета назначения,
Для контроля движения корабля по заданной орбите, маневра и направления орбиты его движения, обеспечения перехода в расчетной точке на траекторию для последующей посадки на небесное тело необходимо знать свое положение в пространстве, т. е. ориентироваться.
Какой же характер ориентировки будет у космонавтов? На каких принципах будет основано определение своего местоположения в космическом полете? Оказывается, и при полете в космическом пространстве астрономическая навигация может служить одним из основных средств определения местоположения летательного аппарата.
Применение автоматических фотоследящих и радиолокационных систем для наблюдения за небесными светилами позволит с достаточной точностью определить местоположение корабля в космическом пространстве. Благодаря возможности заранее и точно вычислить положение небесных светил и автоматически измерить угловые величины между ними, а также угловые величины диаметров Солнца и планет или расстояния до их центров астрономический ориентатор автоматически может выдать координаты космического корабля.
Принцип межпланетной навигации основан на использовании поверхностей положения (геометрических мест точек вероятного местоположения) космического корабля относительно каких-то небесных светил.
Для определения координат космического корабля необходимы как минимум три поверхности положения: две из них в пересечении дают линию положения, а пересечение этой линии с третьей поверхностью дает две точки, одна из которых соответствует местоположению космического корабля. Вопрос о том, в какой из них находится корабль, решается просто, так как всегда известно его приближенное местоположение.
Поверхностями положения могут быть:
1. Поверхность равных диаметров планеты или Солнца и равных расстояний до центра одного из этих светил. Она получается путем измерения углового размера видимого диаметра или расстояния до центра какого-либо из этих небесных тел. По форме это сферическая (шаровая) поверхность (рис. 43, а).
2. Поверхность равных углов между направлениями на центры двух небесных тел солнечной системы. Эта поверхность представляет собой циклиду, получаемую вращением дуги окружности вокруг оси, соединяющей центры небесных тел (рис. 43, б).
3. Поверхность равных углов между направлением на планету или Солнце и звезду. Она получается в результате измерения угла между направлением на звезду и направлением на центр одного из небесных тел солнечной системы. Так как звезды находятся на очень большом расстоянии, то лучи света от них идут практически параллельно, поэтому поверхность положения имеет форму конуса с вершиной в центре планеты или Солнца (рис. 43, в).
Для получения поверхностей положения, помимо указанных величин, необходимо также знать размеры планет и Солнца, их эфемериды (положения на небесной сфере), расстояния между этими небесными телами и угловые координаты звезд.
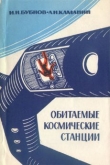
Измеряя направления на небесные светила, углы между направлениями на центры, угловые размеры диаметров планет (Солнца, Луны) или расстояния до их центров и комбинируя эти методы определения поверхности положения, можно получить несколько способов вычисления координат в межпланетном полете. Например, в результате измерения углового диаметра планеты или Солнца и направления на две звезды, получаются сферическая и две конические поверхности положения с общей вершиной в центре планеты (Солнца). Линии пересечения сферы с конусами являются окружностями, в пересечении которых получаются две точки М 1и М 2. Одна из этих точек и является действительным местоположением космического корабля (рис. 44, а).

Рис. 44. Определение местоположения в точке пересечения трех поверхностей положения: а – пересечением сферы с двумя коническими поверхностями; б – пересечением двух сферических поверхностей с конусом; в – пересечением трех сферических поверхностей
Нетрудно видеть, что этот метод аналогичен рассмотренному выше методу астрономического определения места самолета в полете, основанному на измерении высот двух небесных светил.
В результате измерения диаметров двух планет (или планеты и Солнца) и направления на звезду местоположение космического корабля получается в одной из двух точек пересечения двух сферических поверхностей и поверхности конуса (рис. 44, б).
Измерение диаметров трех небесных светил солнечной системы или расстояний до их центров дает еще один способ определения координат космического корабля. В этом случае получаются три сферические поверхности положения. Одна из двух точек пересечения этих поверхностей определяет координаты космического корабля (рис. 44, в).
Кроме рассмотренных, возможны и другие способы определения местоположения по поверхностям положения. Возможно также использование поверхностей положения какой-либо иной геометрической формы. Но всегда их должно быть не менее трех. Только в этом случае их пересечение дает координаты космического корабля.
Необходимо отметить также, что при астрономических методах навигации весьма важно с большой точностью измерять время. Ошибки, даже небольшие, в определении этого навигационного элемента существенно скажутся на точности определения координат космического корабля.
Применение каждого из методов космической навигации в различных условиях полета имеет свои преимущества и недостатки, касающиеся главным образом точности определения местоположения. Так, для ближней навигации, т. е. для ориентировки вблизи планеты назначения, и для обеспечения последующей посадки на нее космического корабля относительно лучшие результаты дает метод, основанный на измерении угловой величины видимого диаметра до планеты или расстояния до ее центра и на измерении углов между направлениями на центр этой планеты и на две звезды.
Для дальней космической навигации лучшие результаты дают методы, основанные на измерении угловых величин между направлениями на небесные светила, например между направлениями на центр планеты (Солнца) и на две звезды или между направлениями на центры трех планет.
Совершенно очевидно, что астронавигационная система должна вырабатывать координаты космического корабля непосредственно в момент измерения, без всяких дополнительных расчетов, что возможно только при полной ее автоматизации.
Определяя местоположение космического корабля пеленгацией небесных светил и имея в результате этого последовательно несколько точек координат корабля, по времени полета и расстоянию между точками координат корабля можно определить и скорость его полета. Точность определения скорости будет прямо пропорциональна промежутку времени между двумя измерениями. Однако эта точность из-за различных ошибок измерения будет недостаточной для быстро летящего космического корабля. Поэтому для определения всех навигационных элементов полета, помимо астронавигационной системы и радиотехнических средств, понадобятся еще такие навигационные средства, как гироориентатор или инерциальная система, суммирующая ускорения движения корабля.
Ориентировка в космическом пространстве – новая, практически еще не проверенная область навигации.